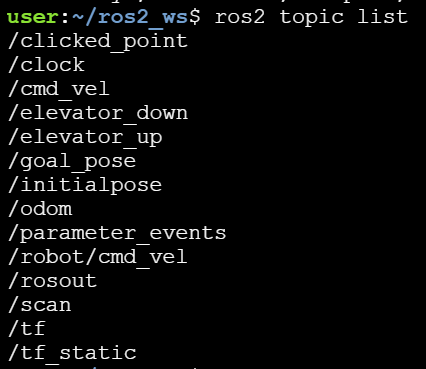
when i checked for ros2 topic list
i got only /parameter_events and /rosout
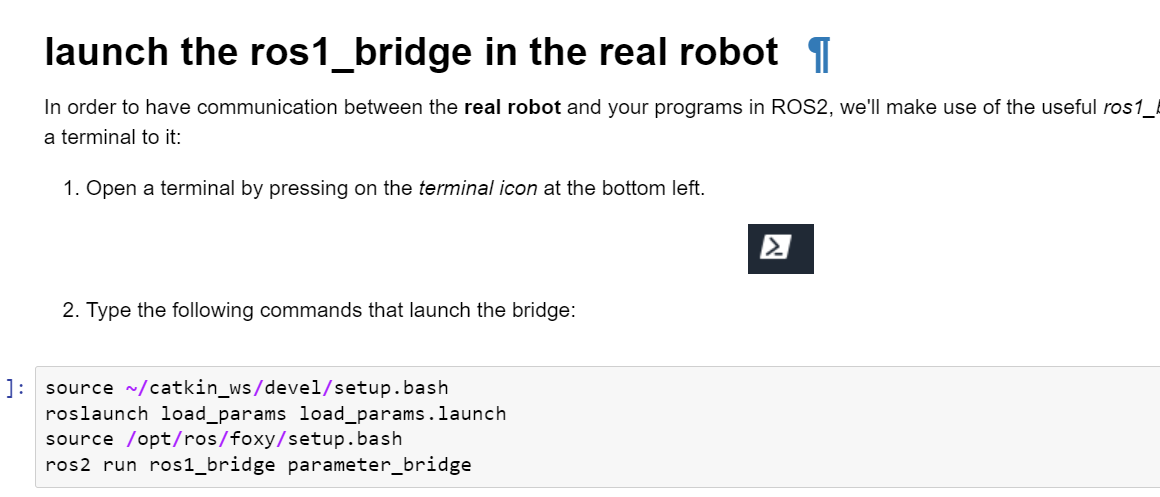
then after spending much time searching for the solution, i found this
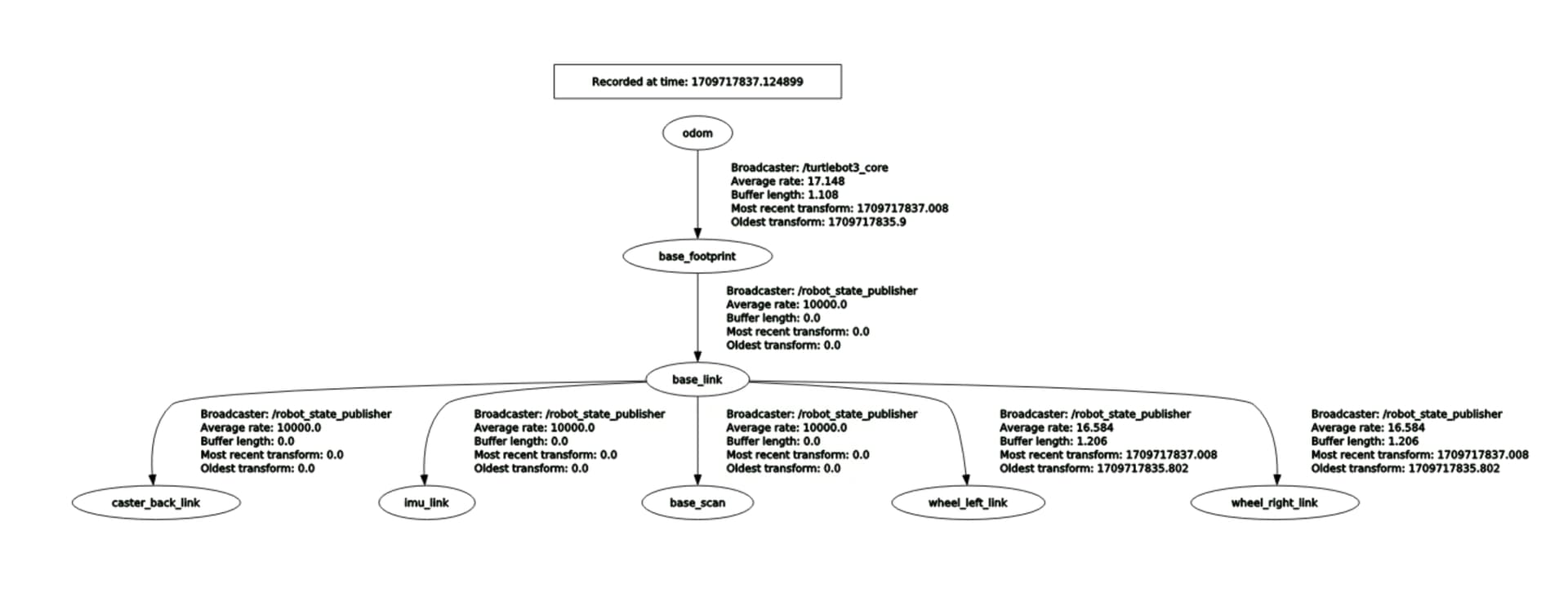
now iam getting all the topics
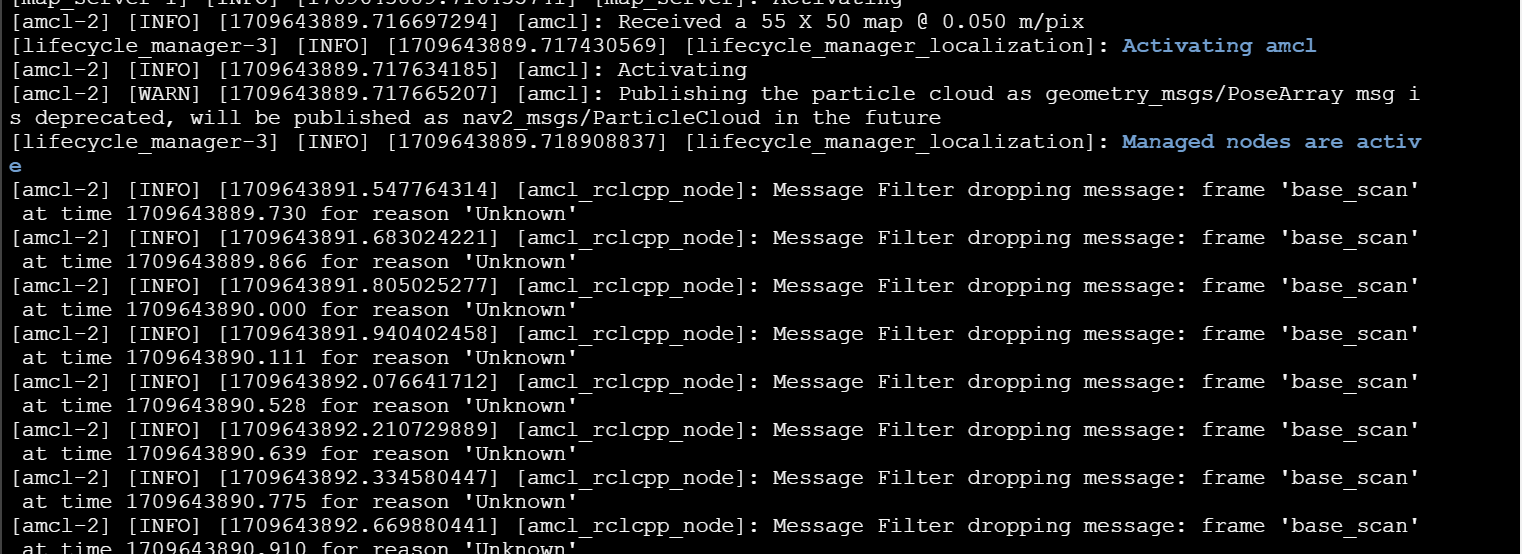
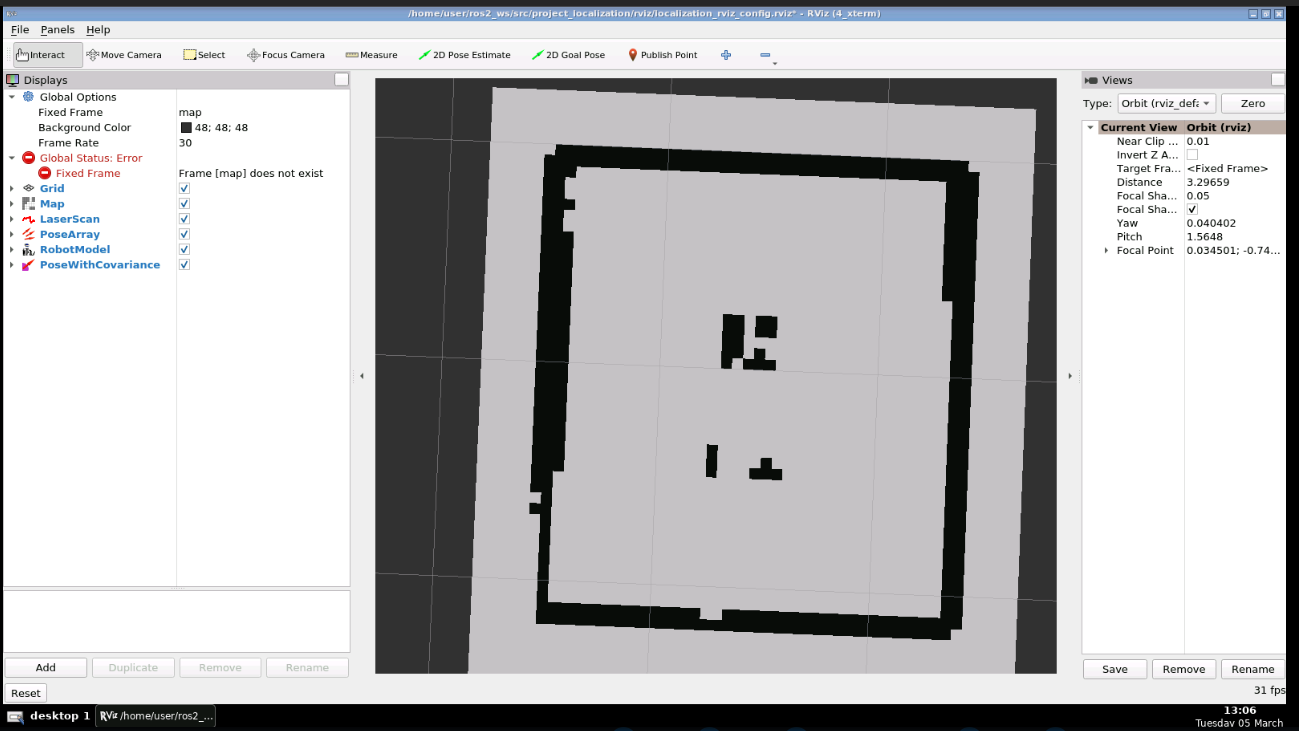
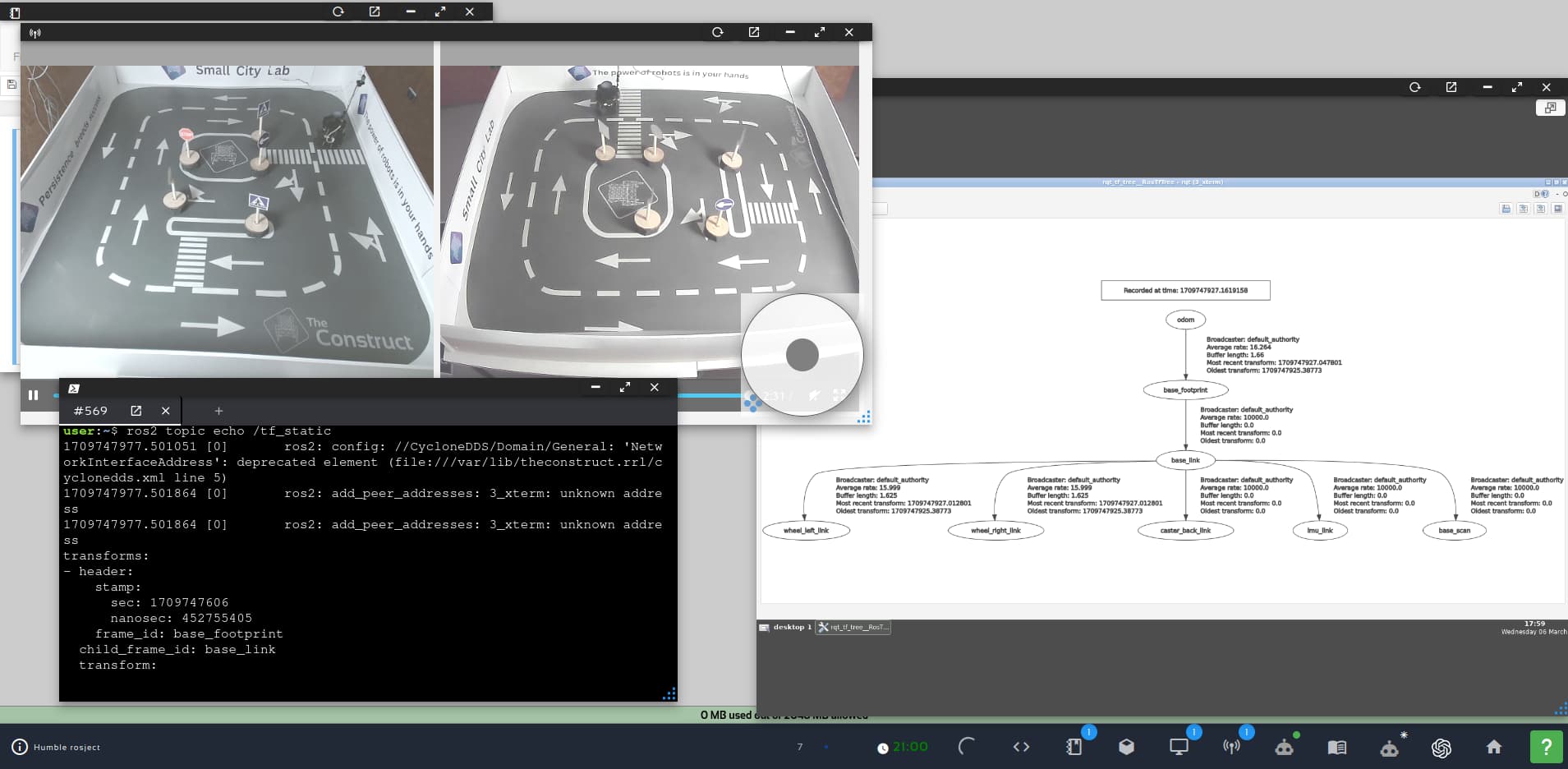
but when I launch my localization node and rviz2 I cannot see the scan data and robot description
then I came to know that in the new version of Rosject no need to start Bridge (however my rosject is an updated version but still for me its showing to launch Ros Bridge in a notebook)
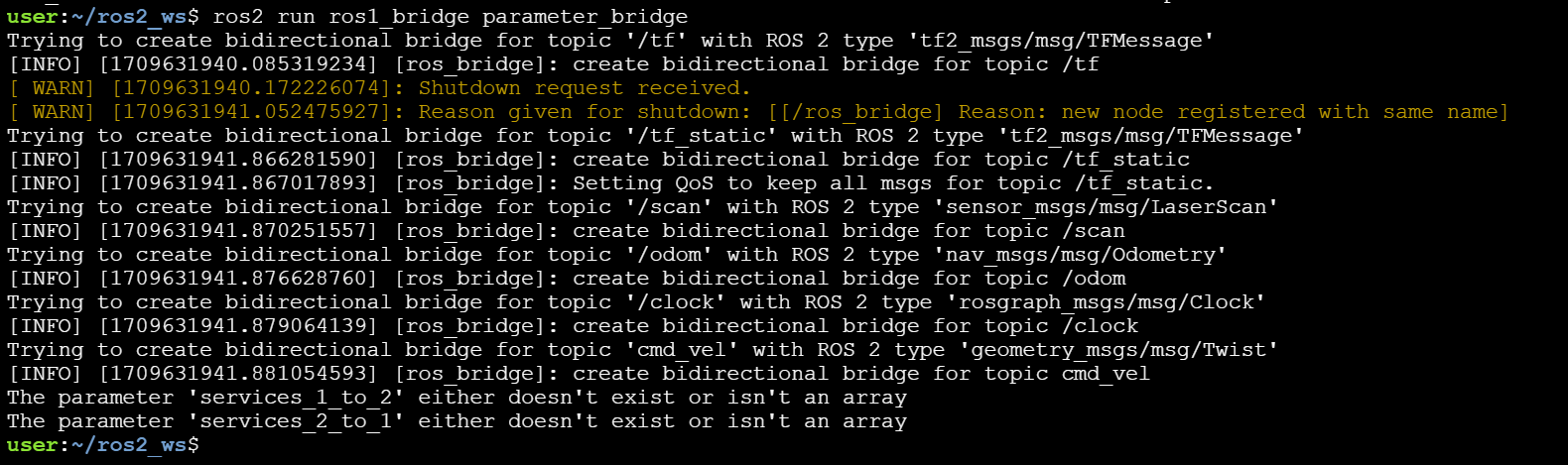
Launching a second bridge was probably the reason why you couldn’t see topics after that, since it interfered with the one already launched in the robot.
I believe the reason why you keep seeing those instructions is because you have not deleted the out of date rosject (make sure to download your progress before). Since the sharing link is the same, it still redirects you to that one.
If you want the updated version, you must delete the current one you have.
It’s the same rosject, just without those instructions. You can also remove it yourself from the out of date one.
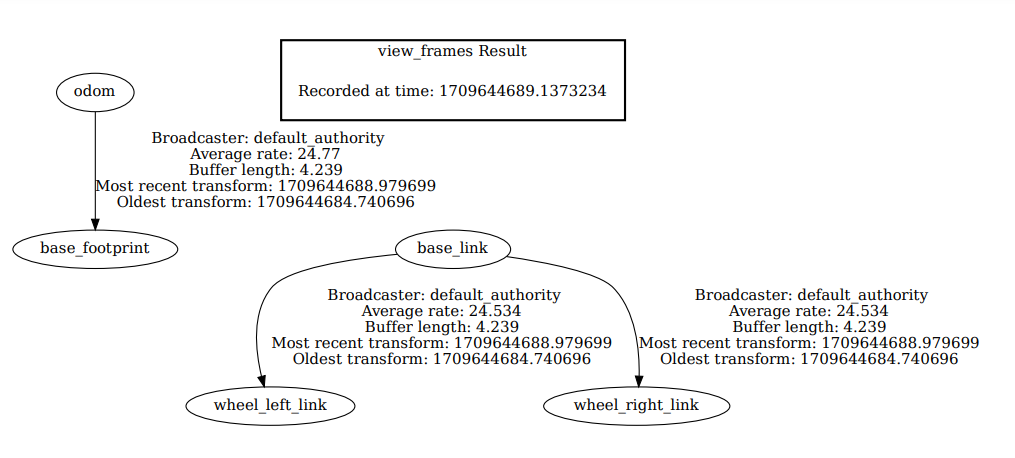
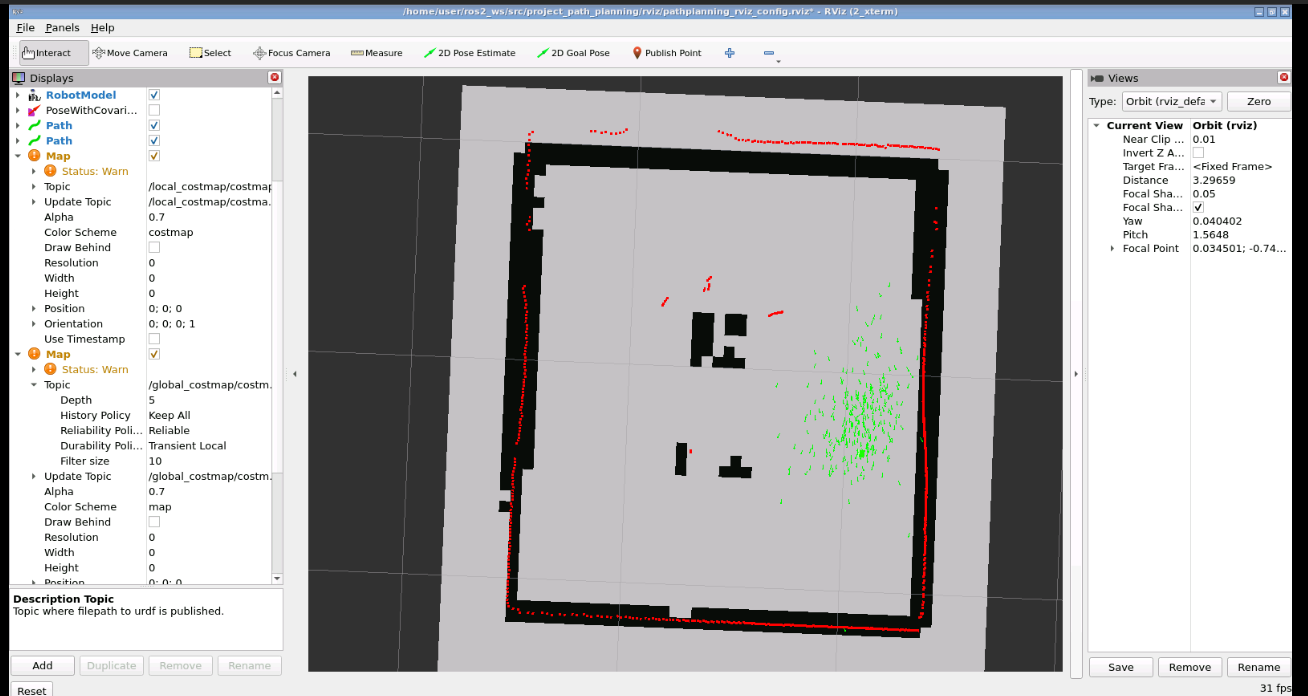
You are right. I don’t know if the robot model is actually published and transferred succesfully over the internet. I will look into this for further improvement.
This is an visualization issue that happens in our remote connections unfortunately. I have not been able to decipher why they can’t be visualized. However, just know that the costmaps are there. Otherwise, you would not be able to navigate.
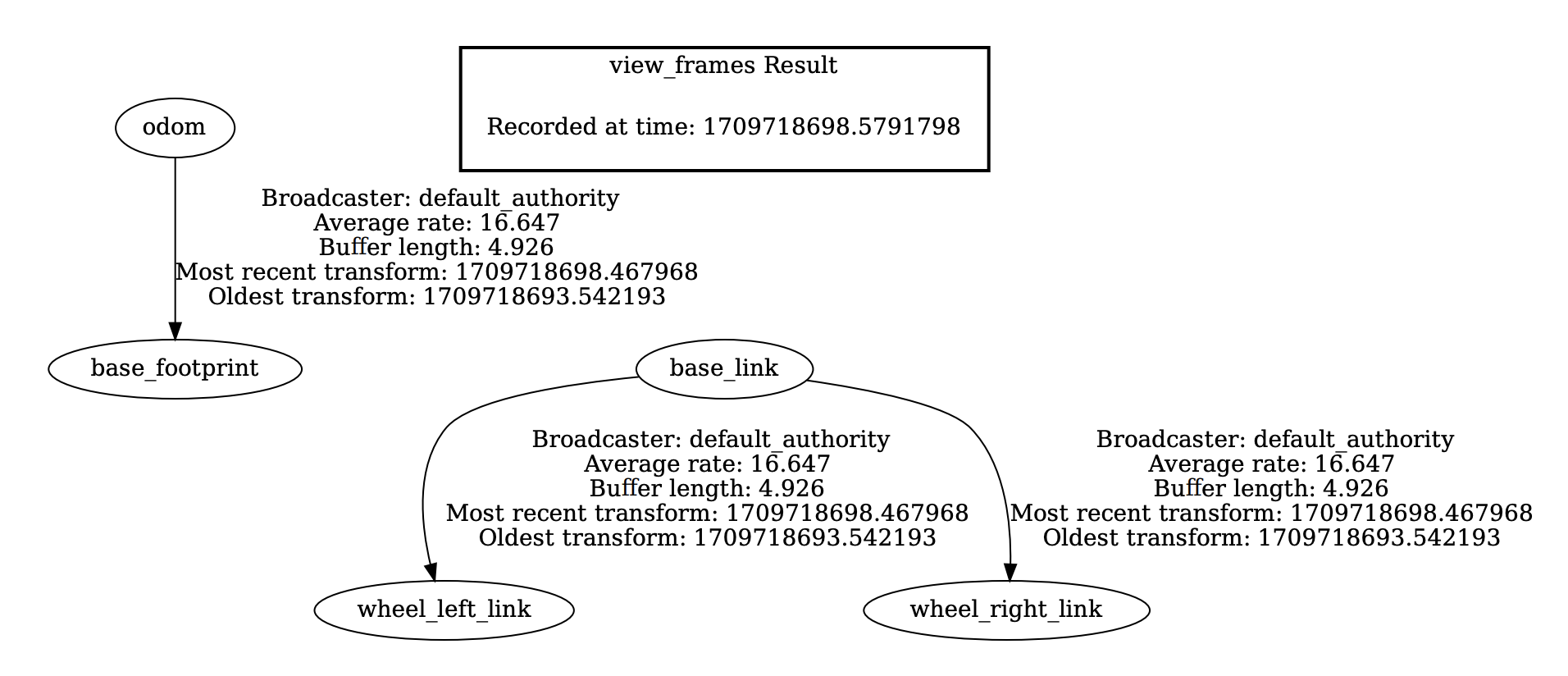
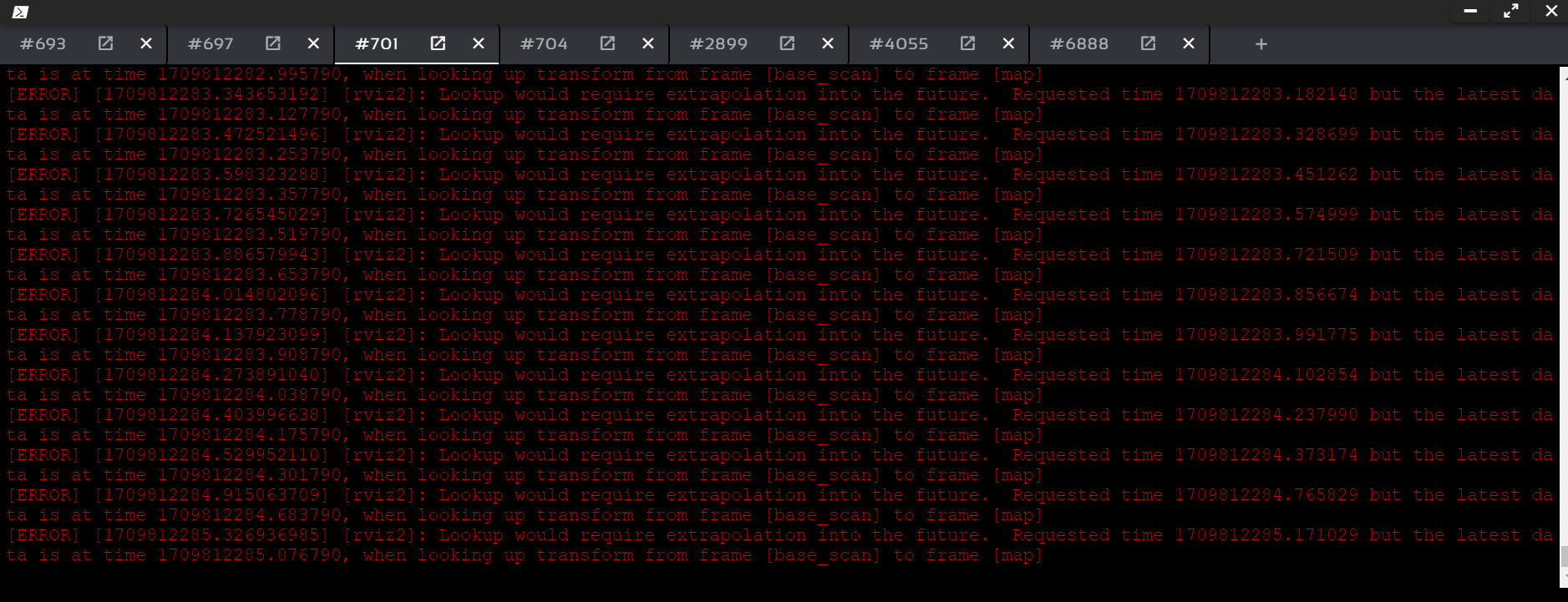
The error in rviz is again because of its inability to catch all of the transforms from base_scan to map. This does not mean there is an error in your code or the system. Its just performance issues from rviz